



La contaminación marina es uno de los mayores desafíos ambientales del planeta, con millones de toneladas de residuos acumulados en los fondos oceánicos. En respuesta, investigadores de la Universidad Técnica de Múnich (TUM), dentro del proyecto europeo SeaClear, han creado un sistema robótico autónomo diseñado para detectar, clasificar y recoger basura submarina utilizando inteligencia artificial (IA).
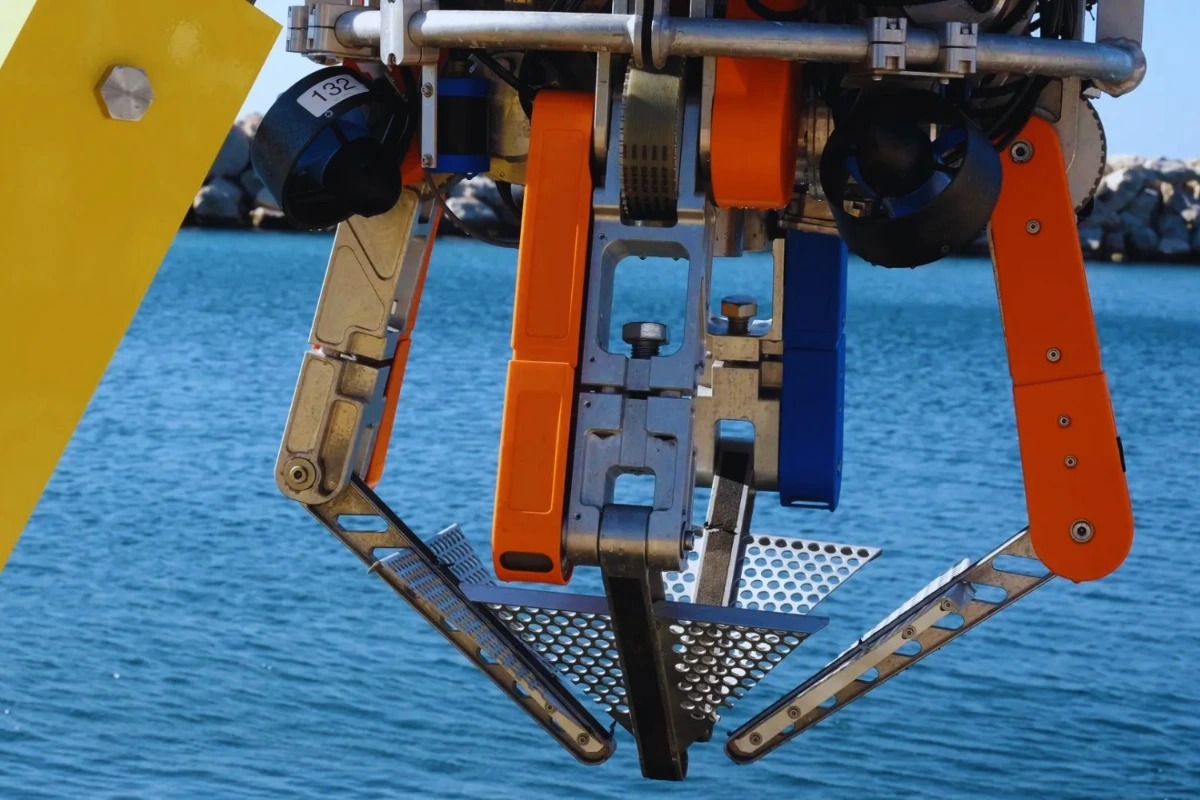
El sistema integra una embarcación nodriza no tripulada, un dron aéreo de apoyo y dos robots submarinos: uno que mapea el entorno mediante sonar y cámaras, y otro que ejecuta la recolección con una pinza robótica de cuatro “dedos”, capaz de levantar objetos de hasta 250 kilogramos. Este mecanismo aplica una fuerza de 4000 newtons y cuenta con sensores que ajustan la presión para no dañar materiales frágiles como botellas o cubos de plástico.
Su IA, entrenada con más de 700 imágenes, permite reconstruir los objetos en 3D, identificar los residuos y determinar el punto de agarre más seguro. Además, el robot puede operar de manera autónoma durante dos horas y ha sido probado con éxito en el puerto de Marsella (Francia), mostrando su eficacia a más de 16 metros de profundidad, donde el trabajo humano resulta más riesgoso.
El proyecto SeaClear, financiado por la Unión Europea, busca desarrollar soluciones sostenibles para limpiar los fondos marinos, especialmente en puertos y costas urbanas. Si se implementa a gran escala, esta tecnología podría revolucionar la lucha contra la contaminación oceánica, reduciendo riesgos humanos y mejorando la eficiencia de recolección de residuos bajo el agua.





